


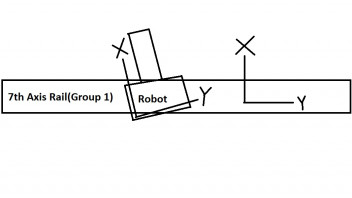
我正在使用带有 R30iA 控制器的 R2000iB 150U 机器人,机器人倒挂在导轨上,导轨是运动组之一中的轴 7。我的问题是如何纠正机器人未完全垂直于第 7 轴导轨安装的情况。当我在世界坐标系 y 中将机器人移动到几乎可以到达两个方向并在两个点的地板上做一个标记时,我然后确保 TCP 与第一个标记对齐,然后将第 7 轴移动到第二个点(而不是世界框架中的机器人 y)它超出了大约 8 毫米。我的假设是,这是由于机器人认为它与第 7 轴的线性运动完全成直角,但我认为它略有偏差。我附上了一张图片来帮助说明我的意思,我大大夸大了这个问题以使其清楚。
 任何帮助表示赞赏。谢谢
任何帮助表示赞赏。谢谢我相信解决这个问题的唯一方法是稍微偏离单个主 J1 以使 y 轴与导轨匹配。然后,您需要划一个新的见证标记。
完成此操作后,您需要重新教授任何要点。还要注意你的轴限制会稍微偏离。
按照 HawkME 对 J1 的建议,我也会检查其他轴上的母带处理。由于它是 R-30iA,因此过去可能会进行糟糕/匆忙的重新制作。
感谢伟大的绘图!
HawkME 是正确的。您需要重新制作 J1,因为要使第 7 轴正常工作,它必须与 X 或 Y 轴完全对齐。
PS。确保机器人知道它是颠倒的。如果您在初始设置中没有这样做,它在 $PARAM_GRP.$MOUNT_ANG 中。如果你不这样做,电机扭矩会受到重力的反向影响。我已经看到这会导致机器人完全停止。
这是针对 R30iB,所以我不确定它是否适用于 R30iA。
在轴 7 设置期间,您可以输入自定义角度 i到横向。
找出那个角度,然后输入它。 J1 自定义掌握也可以,但感觉有点老套。


