


我有一个关于发那科愿景的问题。我的机器人来寻找在传送带上找到的零件,但我想根据阈值将我的零件放在不同的地方。我不知道该怎么做,因为如果我修改 GPM 定位器中的阈值,将不再检测到零件
你能帮我吗?
谢谢
p>你是在谈论对比度阈值吗?你为什么想这么做?请解释你的应用程序。
我使用一个 blob,我想根据阈值对部分进行排序
我不知道你想看什么阈值,但在你的视觉过程中你可以做一个测量输出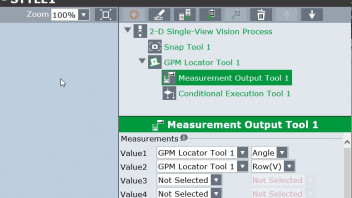
然后在你的代码中,在 GET OFFSET 之后,你可以将该数据放入寄存器中,并根据在你的数据上。下面我正在查看返回的角度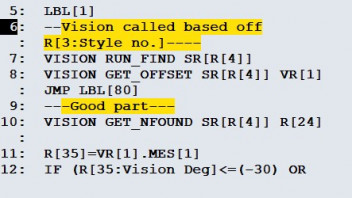
你可以创建多个 Blob 工具。在 blob 工具中,使用双阈值并将范围设置为仅包括您希望此工具查找的对象。在每个 blob 工具中设置一个唯一的模型 ID。模型 ID 可在视觉中访问调用 RUN_FIND 时返回的寄存器。


